
Dom / Aktualności / Wiadomości branżowe / Jakie silniki są używane w systemach AGV i jak wybrać odpowiedni silnik napędowy AGV?

 język
język
Przemysł aplikacji
Agv
Zautomatyzowane roboty

cięcie laserowe

Sortowanie logistyczne

Stacja mocy fotowoltaicznej

Urządzenia medyczne
Jakie silniki są używane w systemach AGV i jak wybrać odpowiedni silnik napędowy AGV?
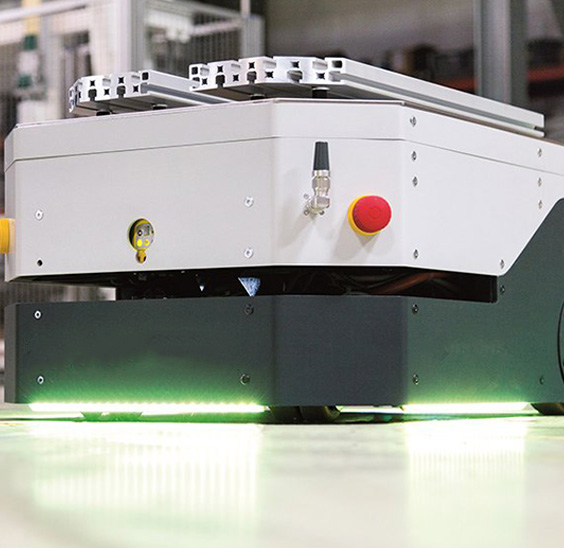
Silnik napędowy jest najważniejszym elementem elektromechanicznym pojazdu autonomicznego (AGV). Określa, jak pojazd AGV przyspiesza, jak precyzyjnie się ustawia, ile ładunku może przewieźć, jak długo wystarcza akumulator między ładowaniami i jak długo pojazd działa, zanim układ napędowy będzie wymagał konserwacji. Pojazd AGV ze słabym lub nieprawidłowo określonym silnikiem napędowym nie jest w stanie spełnić w produkcji wymagań dotyczących ładowności i prędkości; silnik o słabej sprawności silnika wyczerpuje akumulator szybciej, niż jest to w stanie pomieścić operacja logistyczna; taki z silnikiem napędowym wymagającym częstej konserwacji powoduje nieplanowane przestoje w systemie, którego całą wartością jest niezawodna, ciągła, autonomiczna praca.
Dla integratorów systemów AGV, inżynierów robotyki określających komponenty napędowe, zespołów automatyzacji magazynów oceniających platformy AGV oraz twórców sprzętu OEM projektujących nowe pojazdy AGV, zrozumienie technologii silników stosowanych w systemach napędowych AGV – oraz parametrów specyfikacji, które określają, która technologia pasuje do danego zastosowania – jest niezbędną wiedzą do podejmowania właściwych decyzji dotyczących komponentów. W tym przewodniku omówiono typy silników napędowych AGV, parametry doboru i specyficzne wymagania, które odróżniają zastosowania silników AGV od ogólnych zastosowań silników przemysłowych.
Dlaczego wymagania dotyczące silnika napędowego AGV różnią się od ogólnych wymagań dotyczących silników przemysłowych?
Silniki napędowe AGV działają w wymagających i charakterystycznych warunkach, które odróżniają je od większości ogólnych zastosowań silników przemysłowych:
Zasilanie akumulatorowe. Wszystkie pojazdy AGV są zasilane bateryjnie — działają z akumulatora prądu stałego (zwykle o napięciu nominalnym 24 V, 36 V lub 48 V) bez podłączenia do zasilania sieciowego. Wymaga to zasadniczo silników napędowych kompatybilnych z prądem stałym. Silniki prądu przemiennego mogą być używane z wbudowanymi falownikami, ale spadek wydajności wynikający z inwersji prądu stałego na prąd przemienny w systemie zasilanym bateryjnie jest znaczny. Silniki prądu stałego — a w szczególności silniki BLDC — są dominującym wyborem, ponieważ pobierają energię z akumulatora bezpośrednio (lub poprzez przetwornicę DC-DC) bez kary za inwersję.
Częste cykle start-stop. Pojazdy AGV przyspieszają od prędkości spoczynkowej do prędkości jazdy, docierają do punktu odbioru lub depozytu i zatrzymują się — wielokrotnie, setki lub tysiące razy dziennie. Silnik napędowy musi wytrzymać ten cykl rozruchu i zatrzymania bez przegrzania lub nadmiernego zużycia, co stawia wymagania w zakresie zarządzania ciepłem silnika, a w przypadku silników szczotkowych – zespołu komutatora i szczotki, które radzą sobie z przejściowymi stanami rozruchowymi o wysokim prądzie.
Działanie dwukierunkowe. Pojazdy AGV muszą jeździć zarówno do przodu, jak i do tyłu, a także muszą płynnie przełączać się między kierunkami, bez wstrząsów mechanicznych. Silnik i jego sterownik muszą obsługiwać płynną dwukierunkową kontrolę prędkości. W przypadku pojazdów AGV z mechanizmem różnicowym układu kierowniczego (w których niezależna kontrola prędkości kół po lewej i prawej stronie powoduje skręt), oba silniki napędowe muszą być precyzyjnie dopasowane pod względem reakcji prędkości i momentu obrotowego, aby zapewnić dokładne sterowanie.
Precyzyjna kontrola prędkości i pozycji. Dokładność nawigacji w nowoczesnych pojazdach AGV — szczególnie w pojazdach AGV naprowadzanych laserowo (LiDAR), naprowadzanych wizyjnie lub na torze magnetycznym — wymaga precyzyjnej kontroli prędkości, a w niektórych systemach precyzyjnego sprzężenia zwrotnego położenia z enkodera silnika napędowego. Silnik musi pracować ze stałymi, kontrolowanymi prędkościami w całym zakresie ładunku i terenu, bez wahań prędkości i niestabilności.
Wysoka wydajność zapewniająca żywotność baterii. W pojeździe autonomicznym zasilanym akumulatorowo sprawność silnika bezpośrednio determinuje czas pracy pomiędzy ładowaniami. Układ silnika napędowego pracujący ze sprawnością 85% zamiast 75% zwiększa zasięg działania pojazdu o około 13%, co w zastosowaniach logistycznych może stanowić różnicę pomiędzy pokonaniem przez pojazd trasy w cyklu akumulatorowym a koniecznością nieplanowanego postoju na ładowanie. Efektywność energetyczna jest pierwszorzędnym wymogiem specyfikacji przy wyborze silnika AGV, a nie kwestią drugorzędną.
Główne typy silników stosowane w układach napędowych AGV
Bezszczotkowe silniki przekładniowe prądu stałego (BLDC): dominująca technologia napędów AGV
Bezszczotkowe motoreduktory prądu stałego są zdecydowanie preferowaną technologią silników napędowych w nowoczesnych systemach AGV. Silnik BLDC zastępuje mechaniczny komutator i zespół szczotek tradycyjnego szczotkowanego silnika prądu stałego komutacją elektroniczną — sterownik silnika odczytuje położenie wirnika (za pośrednictwem czujników Halla lub sprzężenia zwrotnego z enkoderem) i przełącza uzwojenia stojana we właściwej kolejności, aby utrzymać obrót bez fizycznego kontaktu ze szczotkami. Ta elektroniczna komutacja zapewnia silnikom BLDC zdecydowaną przewagę nad silnikami szczotkowymi w kontekście AGV:
No brush wear = no brush maintenance. W szczotkowym silniku prądu stałego szczotki węglowe dociskające pierścienie komutatora zużywają się w sposób ciągły podczas pracy. Przy wysokich cyklach pracy – pojazdy AGV pracujące 20 godzin dziennie w trzyzmianowych operacjach logistycznych – okresy wymiany szczotek można osiągnąć w ciągu kilku miesięcy, co wymaga zaplanowanych przestojów i robocizny zastępczej. Silniki BLDC nie mają szczotek, które mogłyby się zużywać; the only wear components are the motor bearings, which have service lives measured in thousands of hours. W przypadku floty AGV działającej w sposób ciągły wyeliminowanie konserwacji szczotek wiąże się z wysokimi kosztami operacyjnymi i korzyścią w zakresie czasu pracy.
Wyższa wydajność. Silniki BLDC zazwyczaj osiągają sprawność elektryczną i mechaniczną na poziomie 90–95% w znamionowym punkcie pracy, w porównaniu z 75–85% w przypadku równoważnych szczotkowych silników prądu stałego. W pojazdach AGV zasilanych akumulatorowo ta różnica w wydajności bezpośrednio przekłada się na dłuższy czas pracy na cykl ładowania.
Lepsza wydajność cieplna. Ciepło silnika BLDC generowane jest głównie w uzwojeniach stojana, które mają bezpośredni kontakt z obudową silnika, dzięki czemu odprowadzanie ciepła jest efektywne. Silniki szczotkowe wytwarzają ciepło zarówno na uzwojeniach, jak i na styku komutator/szczotka, natomiast punkt styku szczotki znajduje się we wnętrzu silnika, gdzie odprowadzanie ciepła jest mniej efektywne. Silniki BLDC wytrzymują wyższe ciągłe cykle pracy bez przegrzania.
Precyzyjna kontrola prędkości. Electronic commutation with encoder or Hall sensor feedback enables tight closed-loop speed control across a wide operating range. Algorytmy nawigacji AGV opierają się na dokładnym sprzężeniu zwrotnym prędkości koła w celu szacunkowego oszacowania pozycji pomiędzy pozycjami bezwzględnymi — silniki BLDC ze sprzężeniem zwrotnym enkodera zapewniają niezawodną dokładność.
Szczotkowe motoreduktory prądu stałego: ekonomiczne w zastosowaniach AGV o niższych obciążeniach
Szczotkowe motoreduktory prądu stałego są nadal używane w zastosowaniach AGV, gdzie cykl pracy jest krótszy (nie praca ciągła 24 godziny na dobę, 7 dni w tygodniu), gdzie wymagania dotyczące obciążenia użytkowego są skromne i gdzie niższy koszt silnika jest priorytetem w wrażliwych na koszty platformach AGV. W pojazdach AGV przeznaczonych do lekkiej logistyki wewnętrznej – transportu małych części, dostarczania dokumentów, obsługi lekkich linii produkcyjnych – prostsza elektronika sterująca wymagana przez szczotkowe silniki prądu stałego (nie jest potrzebny sterownik komutacyjny) i ich niższy koszt jednostkowy mogą uzasadniać ich wybór zamiast alternatyw BLDC pomimo wymagań dotyczących konserwacji szczotek.
Szczotkowe silniki prądu stałego zapewniają również bardzo wysoki moment rozruchowy — w niektórych konstrukcjach wyższy niż silnik BLDC o tej samej wielkości — co może być przydatne w przypadku pojazdów AGV uruchamianych pod obciążeniem na pochyłościach. Jednakże nowoczesne sterowniki silników BLDC mogą odtworzyć to zachowanie wysokiego momentu rozruchowego poprzez strategie sterowania zorientowane na pole, zmniejszając historyczną przewagę silnika szczotkowego w tym obszarze.
Silniki z przekładnią planetarną do kół napędowych AGV
Regardless of whether the motor element is brushed or brushless DC, AGV drive wheels almost universally use planetary gear reduction between the motor and the wheel. Konfiguracja przekładni planetarnej jest preferowanym typem skrzyni biegów w zastosowaniach AGV z kilku powodów:
Przekładnie planetarne zapewniają najwyższą gęstość momentu obrotowego — najwyższy wyjściowy moment obrotowy dla danej średnicy zewnętrznej skrzyni biegów — co ma kluczowe znaczenie w zespołach kół pojazdów AGV, gdzie kompletny zespół silnik-przekładnia-koło musi mieścić się w wąskich ramach wymiarowych podwozia pojazdu. Współosiowe ustawienie wejścia/wyjścia przekładni planetarnej umożliwia kompaktowy montaż liniowy: silnik → przekładnia planetarna → koło napędowe, wszystko na jednej osi, bez przesunięcia spowodowanego przekładnią czołową lub przekładnią ślimakową.
Przekładnie planetarne zapewniają również wysoką sprawność (92–97% na stopień) w porównaniu z alternatywnymi przekładniami ślimakowymi (zwykle 50–85% w zależności od przełożenia i kąta wyprzedzenia), co jest ważne w zastosowaniach AGV, w których wydajność akumulatora ma krytyczne znaczenie. Silnik napędowy AGV z przekładnią ślimakową, pracujący przy sprawności skrzyni biegów wynoszącej 70%, traci 30% energii elektrycznej pobieranej przez silnik na rzecz ciepła w samej skrzyni biegów – co jest niedopuszczalną karą w przypadku pojazdu zasilanego akumulatorowo.
Kluczowe parametry specyfikacji doboru silnika napędowego AGV
| Parametr | Typowy zakres specyfikacji AGV | Dlaczego to ma znaczenie |
|---|---|---|
| Napięcie znamionowe | 24 V / 36 V / 48 V prądu stałego | Musi odpowiadać napięciu pakietu akumulatorów AGV; wyższe napięcie pozwala na wyższą moc przy niższym prądzie, zmniejszając straty na kablach i temperaturę silnika |
| Moc znamionowa | 50 W – 1000 W na silnik napędowy (w zależności od pojazdu i ładunku) | Musi być wystarczające do przyspieszenia obciążonego pojazdu na najbardziej stromym wzniesieniu w środowisku operacyjnym; zbyt mała moc powoduje przeciążenie termiczne silnika na pochyłościach |
| Prędkość wyjściowa na kole | 50–300 obr/min (wał koła, po redukcji biegu) | Określa prędkość jazdy pojazdu; średnica koła i docelowa prędkość AGV definiują wymagane obroty wału wyjściowego, a tym samym wymagane przełożenie |
| Ciągły wyjściowy moment obrotowy | 5–200 Nm na silnik napędowy (w zależności od obciążenia i nachylenia) | Musi przekraczać moment obrotowy wymagany do poruszania się w pełni obciążonym pojazdem AGV po maksymalnym wzniesieniu przy prędkości znamionowej; zastosuj 2× współczynnik bezpieczeństwa dla marginesu obciążenia udarowego |
| Maksymalny moment obrotowy | 2×–3× ciągły moment obrotowy | Wymagane do przyspieszania od zatrzymania pod pełnym obciążeniem; silnik i sterownik muszą utrzymywać szczytowy moment obrotowy przez cały czas trwania rampy przyspieszania, bez przegrzania lub uruchomienia zabezpieczenia nadprądowego |
| Rozdzielczość enkodera | 100–4096 PPR (impulsy na obrót na wale silnika) | Określa dokładność odometrii dla nawigacji zliczeniowej; wyższa rozdzielczość enkodera poprawia szacowanie pozycji pomiędzy pozycjami bezwzględnymi z czujników nawigacyjnych |
| Wydajność | ≥ 85% ogółem (przekładnia silnika) w znamionowym punkcie pracy | Bezpośrednio określa czas pracy akumulatora; Planetarka BLDC osiąga łączną wydajność 90%; wolę to niż szczotkowaną przekładnię ślimakową (łącznie 60–70%) |
| Ocena IP | Minimum IP54 dla ogólnej logistyki wewnętrznej; IP65 dla środowisk mokrych i zakurzonych | Silniki AGV są narażone na zanieczyszczenia z poziomu podłogi; Niewłaściwa ochrona przed wnikaniem prowadzi do przedwczesnych uszkodzeń łożysk i uzwojeń z powodu kurzu i wilgoci |
| Cykl pracy | S1 ciągły dla operacji 24/7; S3 praca przerywana na jedną zmianę | Parametry cieplne silnika muszą odpowiadać wzorcowi operacyjnemu; silnik przystosowany do pracy przerywanej S3 przegrzeje się w zastosowaniach ciągłych S1 AGV |
Jak obliczyć wymagany moment obrotowy silnika napędu AGV
Moment obrotowy wymagany do prowadzenia pojazdu AGV ze stałą prędkością na płaskiej powierzchni musi pokonać opór toczenia; na pochyłości grawitacja dodaje składnik oporu. Obliczenia dla typowego pojazdu AGV z dwoma kołami napędowymi:
Całkowita masa pojazdu: W = (maksymalna ładowność tara AGV) × g [niutony]
Siła oporu toczenia: F_rolling = W × μ_r, gdzie μ_r to współczynnik oporu toczenia (zwykle 0,01–0,02 dla kół gumowych na gładkim betonie; 0,02–0,05 dla miękkich podłóg lub chropowatych powierzchni)
Siła oporu nachylenia (dla pochyłości): F_grade = W × sin(θ), gdzie θ to kąt nachylenia (dla nachylenia 5%, θ ≈ 2,86°, sin(θ) ≈ 0,05)
Całkowita siła napędowa: F_total = F_rolling F_grade
Wymagany moment obrotowy na kole napędowym (na silnik przy założeniu dwóch silników napędowych): T_wheel = (F_total / 2) × r_wheel, gdzie r_wheel to promień koła napędowego w metrach
Wymagany moment obrotowy silnika: T_motor = T_wheel / (i × η), gdzie i to przełożenie redukcji biegów, a η to sprawność skrzyni biegów
Na przykład pojazd AGV o całkowitej masie ładunku 500 kg, kołach napędowych o średnicy 150 mm, na nachyleniu 3%, z przekładnią planetarną 25:1 i wydajnością 0,95:
- Szer. = 500 × 9,81 = 4905 N
- F_rolling = 4905 × 0,015 = 73,6 N
- F_grade = 4905 × 0,03 = 147,2 N
- F_całkowita = 220,8 N; na silnik = 110,4 N
- T_koło = 110,4 × 0,075 = 8,28 Nm
- T_motor = 8,28 / (25 × 0,95) = 0,35 Nm znamionowy ciągły moment obrotowy
Dodać 2× współczynnik bezpieczeństwa dla momentu przyspieszającego: wymagany szczytowy moment obrotowy silnika ≈ 0,70 Nm. Motoreduktor planetarny BLDC o szczytowym momencie obrotowym ≥ 0,70 Nm przy 48 V i przełożeniu 25:1 spełnia ten wymóg. Wartość znamionową ciągłego momentu obrotowego należy sprawdzić w porównaniu z wymaganym ciągłym momentem obrotowym (0,35 Nm przy pełnym obciążeniu na danym terenie) z odpowiednim marginesem termicznym.
Często zadawane pytania
W jaki sposób konfiguracja układu kierowniczego pojazdu AGV wpływa na wybór silnika?
Pojazdy AGV korzystają z kilku konfiguracji układu kierowniczego, z których każda ma inne wymagania dotyczące silnika. Napęd różnicowy (dwa niezależne koła napędowe, bez kierownicy) tworzy zakręty, uruchamiając dwa silniki napędowe z różnymi prędkościami — wymaga to ścisłego dopasowania obu silników pod względem charakterystyki prędkości i momentu obrotowego oraz sterowania przez skoordynowany sterownik silnika, który może sterować różnicą prędkości na obu kołach jednocześnie. Układ kierowniczy trójkołowca (jedno kierowane koło napędowe z przodu, dwa pasywne koła tylne) wykorzystuje pojedynczy silnik napędowy z oddzielnym siłownikiem sterującym — wybór silnika jest prosty, należy jednak wziąć pod uwagę integrację siłownika sterującego. Napędy dookólne (koła mecanum lub omni w każdym rogu) wykorzystują cztery indywidualnie sterowane silniki i umożliwiają ruch boczny i ukośny — sterowniki silników muszą obsługiwać koordynację czterokanałową, a silniki muszą mieć doskonałe właściwości dopasowywania prędkości w całym zakresie roboczym.
Jaki typ enkodera jest zalecany do silników napędowych AGV?
Enkodery inkrementalne (kwadraturowe wyjście A/B) są najpopularniejszym typem w odometrii silnika napędowego AGV — dostarczają liczbę impulsów na obrót, które kontroler nawigacyjny przekształca na przebytą odległość koła i prędkość. Enkodery absolutne są czasami używane w zastosowaniach wymagających, aby sterownik znał pozycję bez bazowania po włączeniu zasilania, ale w przypadku odometrii (pomiaru odległości) enkodery inkrementalne są standardem. Rozdzielczość 500–1000 PPR na wale silnika jest zazwyczaj wystarczająca do zapewnienia dobrej dokładności odometrii przy standardowych przełożeniach przekładni planetarnej. Wyższa rozdzielczość (2000–4096 PPR) poprawia odometrię w układach o niskim przełożeniu, w których wał koła wykonuje większą część obrotu na obrót silnika.
Czy silniki napędowe AGV można stosować z hamowaniem regeneracyjnym?
Tak — sterowniki silników BLDC w zastosowaniach AGV zazwyczaj obsługują hamowanie regeneracyjne, w którym silnik działa jak generator podczas zwalniania, przekształcając energię kinetyczną z powrotem w energię elektryczną, która ładuje akumulator. Hamowanie regeneracyjne zmniejsza zużycie akumulatora (szczególnie na trasach AGV z zatrzymywaniem i ruszaniem, na których występują częste przypadki zwalniania), zmniejsza zużycie hamulców i umożliwia szybsze zwalnianie bez mechanicznego nagrzewania hamulców. Efektywność odzyskiwania energii podczas hamowania regeneracyjnego w typowym zastosowaniu AGV wynosi 15–30% energii zużywanej na przyspieszenie, co ma znaczenie w przypadku operacji na krótkich trasach z dużą częstotliwością. Zdolność do regeneracji wymaga, aby sterownik silnika obsługiwał dwukierunkowy przepływ prądu i aby system zarządzania akumulatorem akceptował regenerowany prąd ładowania bez włączania zabezpieczenia przepięciowego.
Silniki napędowe AGV z inteligentnej produkcji Zhejiang Saiya
Zhejiang Saiya Intelligent Manufacturing Co., Ltd. , Deqing, Zhejiang, produkuje motoreduktory planetarne BLDC, szczotkowane motoreduktory planetarne na prąd stały oraz kompletne zespoły silników napędowych AGV do zastosowań w pojazdach autonomicznych. Asortyment produktów AGV obejmuje silniki napędowe ze zintegrowanymi enkoderami przy nominalnym napięciu akumulatora 24 V, 36 V i 48 V, w rozmiarach ramy od 32 mm do 82 mm, z przełożeniami przekładni planetarnej od 5:1 do ponad 500:1, obejmującymi klasy ładunku od lekkich pojazdów AGV do transportu małych części po platformy do transportu materiałów o dużej wytrzymałości. Niestandardowe specyfikacje silnika AGV — napięcie, przełożenie, rozdzielczość enkodera, montaż, stopień ochrony IP i złącze — są dostępne za pośrednictwem firmowej usługi rozwojowej OEM/ODM.
Skontaktuj się z nami, podając specyfikacje pojazdu AGV — masę pojazdu, ładowność, maksymalną prędkość, napięcie akumulatora, średnicę koła i środowisko pracy — aby otrzymać rekomendację i wycenę silnika napędowego.
Powiązane produkty: Produkty projektu AGV | Bezszczotkowe silniki przekładniowe prądu stałego | Silniki z przekładnią planetarną | Precyzyjna przekładnia planetarna | Szczotkowane silniki z przekładnią prądu stałego
Powiązane produkty
-

Ten silnik przekładni prądu przemiennego 6 W to wydajny, kompaktowy i niezawodny mały silnik odpowiedni dla szerokiej gamy zastosowań przemysłowych i gospodarstw domowych. Rama motorowa 60 mm x 60 ...
Zobacz szczegóły -

Silnik DC GBEAR 6W jest przeznaczony do wydajności i wszechstronności, odpowiedni do różnych zastosowań. Z kompaktową ramą o wymiarach 60 mm x 60 mm, wpisuje się płynnie do ciasnych przestrzeni. Si...
Zobacz szczegóły -

Silnik Gear Brush Gear 10W oferuje wysoką wydajność i zdolność adaptacyjną dla szeregu zastosowań przemysłowych i hobbystycznych. Z rozmiarem ramki 60 mm x 60 mm silnik ten został zaprojektowany ta...
Zobacz szczegóły -

Bezszczotkowy silnik przekładni 24 V to wszechstronny i wydajny silnik zaprojektowany do szeregu zastosowań. W wymiarach od 60 mm x 60 mm do 104 mm x 104 mm, ten silnik może zmieścić się w różnych ...
Zobacz szczegóły -

32 mm szczotkowany silnik narzędzi planetarnego to kompaktowe i wydajne rozwiązanie zaprojektowane do różnych zastosowań wymagających wysokiego momentu obrotowego i precyzyjnego sterowania. Z średn...
Zobacz szczegóły -

42 mm pędzel pędzel Silnik jest wszechstronnym i wydajnym komponentem szeroko stosowanym w różnych zastosowaniach wymagających precyzyjnego momentu obrotowego i prędkości. Z prądem znamionowym od 0...
Zobacz szczegóły -

32 mm bezszczotkowy silnik zębatego przekładni to wysokowydajne, kompaktowe rozwiązanie idealne do zastosowań wymagających wydajności i niezawodności. Działając na napięciu znamionowym 24 V i zużyw...
Zobacz szczegóły -

Bezszczotkowy silnik 42 mm to wysokowydajny produkt silnikowy, który jest szeroko stosowany w różnych scenariuszach wymagających precyzyjnej transmisji. Znany prąd tego silnika wynosi 1,3A, a znami...
Zobacz szczegóły -

Skrzynia biegów SPE, zakres wielkości kołnierza z modelem 40, 60, 80, 120 i 160, zostały zaprojektowane tak, aby zapewnić wydajne i solidne rozwiązania transmisji zasilania. Te skrzynie biegów mają...
Zobacz szczegóły -

Seria SPF ma kwadratowe kołnierze wyjściowe, przynosząc wymiary od 40 mm do 160 mm. Te kołnierze są zaprojektowane w celu doskonalenia się w różnych zastosowaniach przemysłowych, oferując niezawodn...
Zobacz szczegóły -

52 mm szczotkowany silnik narzędzi planetarnego to kompaktowe i wydajne rozwiązanie zaprojektowane do różnych zastosowań wymagających wysokiego momentu obrotowego i precyzyjnego sterowania. Z średn...
Zobacz szczegóły -

Silnik z biegiem przekładni szczotki 62 mm jest wszechstronnym i wydajnym komponentem szeroko stosowanym w różnych zastosowaniach wymagających precyzyjnego momentu obrotowego i prędkości. Z prądem ...
Zobacz szczegóły
Dane kontaktowe
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Biuro: Hangzhou Saiya Transmisson Equipment Co., Ltd
- Office Address: Pokój 2201, Wanyin Building, Hangzhou City, prowincja Zhejiang
- Fabryka: Zhejiang Saiya Intelligent Manufacturing Co., Ltd.
- Factory Address: Budynek nr 35, Zhongnan High-Tech Yunhe Zhigu Industrial Park, Xinan Town, Deqing County, Huzhou City, Zhejiang, Chiny
Szybki link
PRODUKT
Jeśli jesteś zainteresowany
W naszych produktach,
Proszę o skonsultuj się
Copyright © Zhejiang Saiya Intelligent Manufacturing Co., Ltd. All Rights Reserved.
Niestandardowe dostawcy silników redukcji sprzętu
